

Kraj: Polska
Lokalizacja: Samoklęski Małe, PL
Na Useme od 23 października 2021
Jestem młodym i aspirującym programistą, który z pasją eksploruje świat technologii, szczególnie korzystając z rozwiązań open-source. Moja przygoda z programowaniem rozpoczęła się, gdy pierwszy raz zetknąłem się z systemem operacyjnym Linux. Od tego czasu stał się on moim ulubionym środowiskiem pracy, ciągle rozwijam swoje umiejętności, wykorzystując wbudowane narzędzia. W wolnym czasie zajmuję się tworzeniem renderów w Blenderze i jestem entuzjastą programowania mikrokontrolerów oraz eksperymentowania z Raspberry Pi. Moje podejście do pracy charakteryzuje się szybkim uczeniem się i zaangażowaniem w stałe doskonalenie. Jestem otwarty na nowe wyzwania i gotów do współpracy z zespołem w celu osiągnięcia wspólnych celów.
Sty 2023 - Teraz
Teldat
Maintenance and development of dedicated software for hardware designed by Teldat for the military sector. Specialization in network solutions, including routing protocols and network security
Lip 2022 - Gru 2022
Reverbland
Developing software and designing an algorithmic MIDI sequencer for the music industry, based on the ARM processor. Supporting and maintaining a platform for a metal processing company
Sty 2022 - Lip 2022
Autoproces
Building applications for 2D and 3D object detection using neural networks based on Raspberry Pi for various industrial solutions
Mar 2021 - Sty 2022
Metalwit Robots
Experience in designing, planning, and maintaining vision systems. Familiar with using neural networks and traditional algorithms to create these systems. These solutions were developed to support automation in production processes, particularly at r
 Sequencer MIDI
Sequencer MIDI
Euclidian sequencer based rp 2040. Project is open source but still in beta version. https://playableel.blogspot.com
Euclidian sequencer based rp 2040. Project is open source but still in beta version. https://playableel.blogspot.com
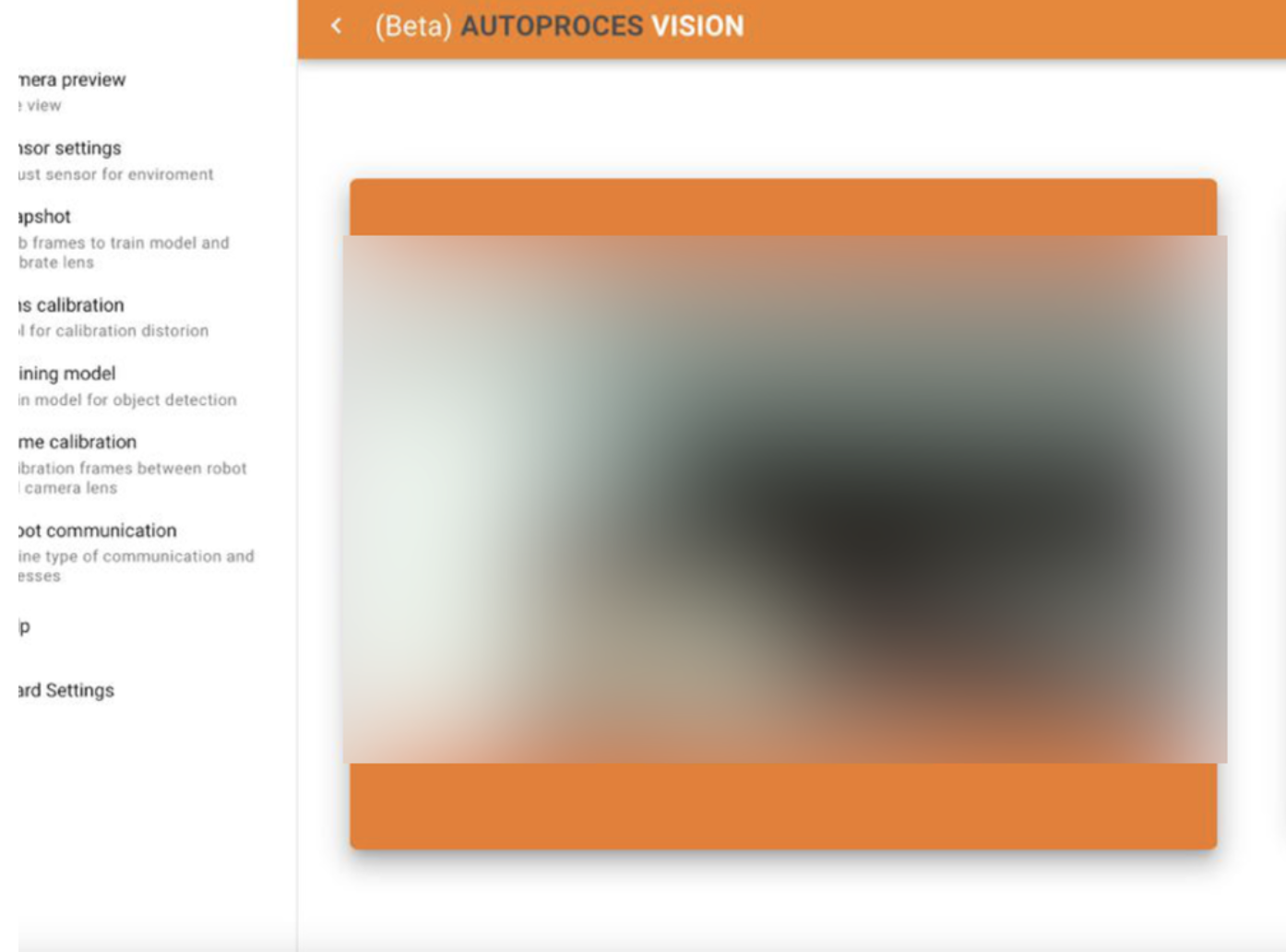
End-to-end application for training and deployment of models for object detection and validation. Application communicates with PLC's and robots. Base board is Raspberry Pi 4
End-to-end application for training and deployment of models for object detection and validation. Application communicates with PLC's and robots. Base board is Raspberry Pi 4
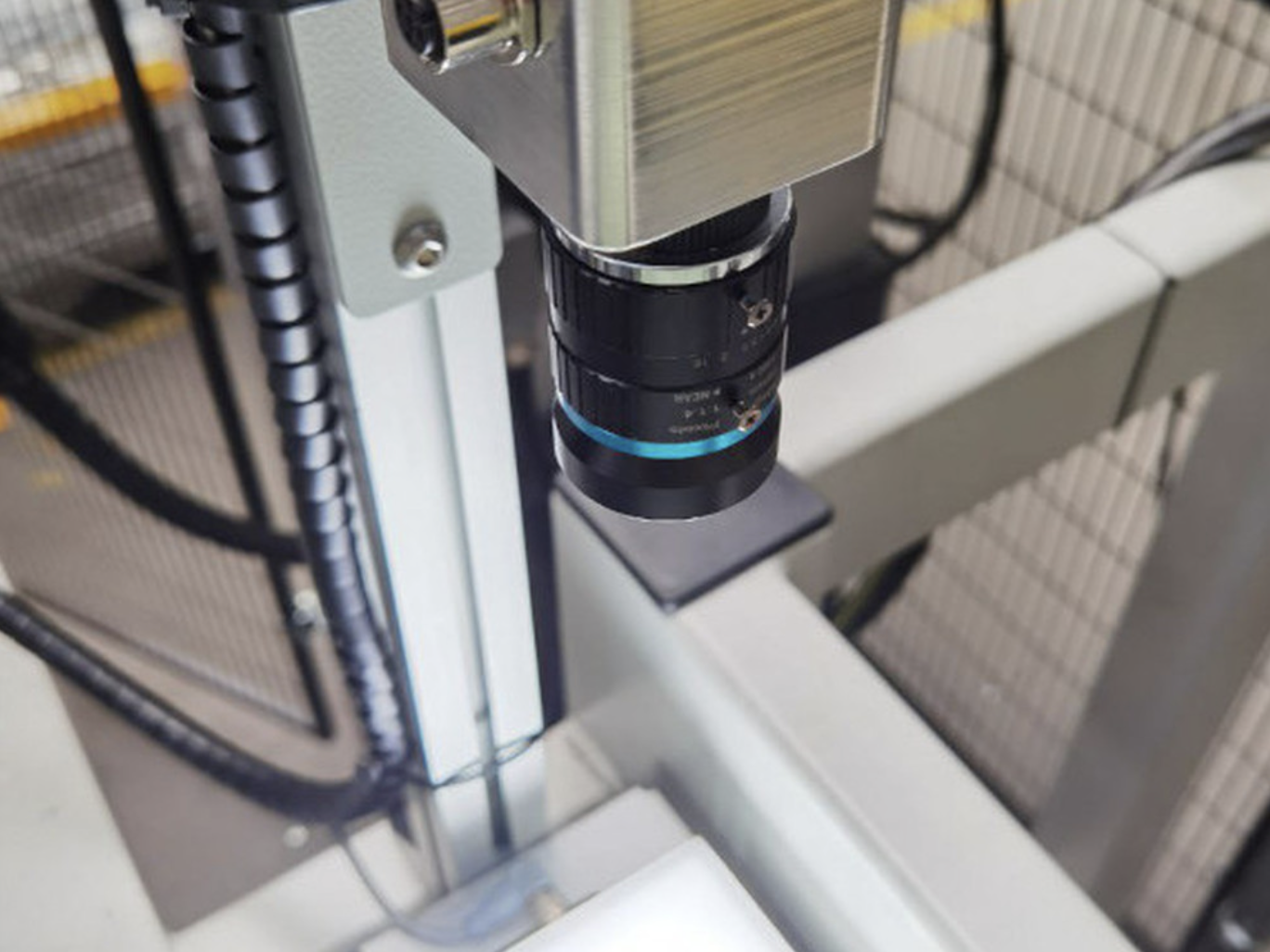
Product placement in riveting machine using our smart camera. Very high precision (0.01 mm). Additional quality check and fast response time. STM-32 Camera with MicroPython on board. Works with Fanuc Robot using socket messaging communication.
Product placement in riveting machine using our smart camera. Very high precision (0.01 mm). Additional quality check and fast response time. STM-32 Camera with MicroPython on board. Works with Fanuc Robot using socket messaging communication.
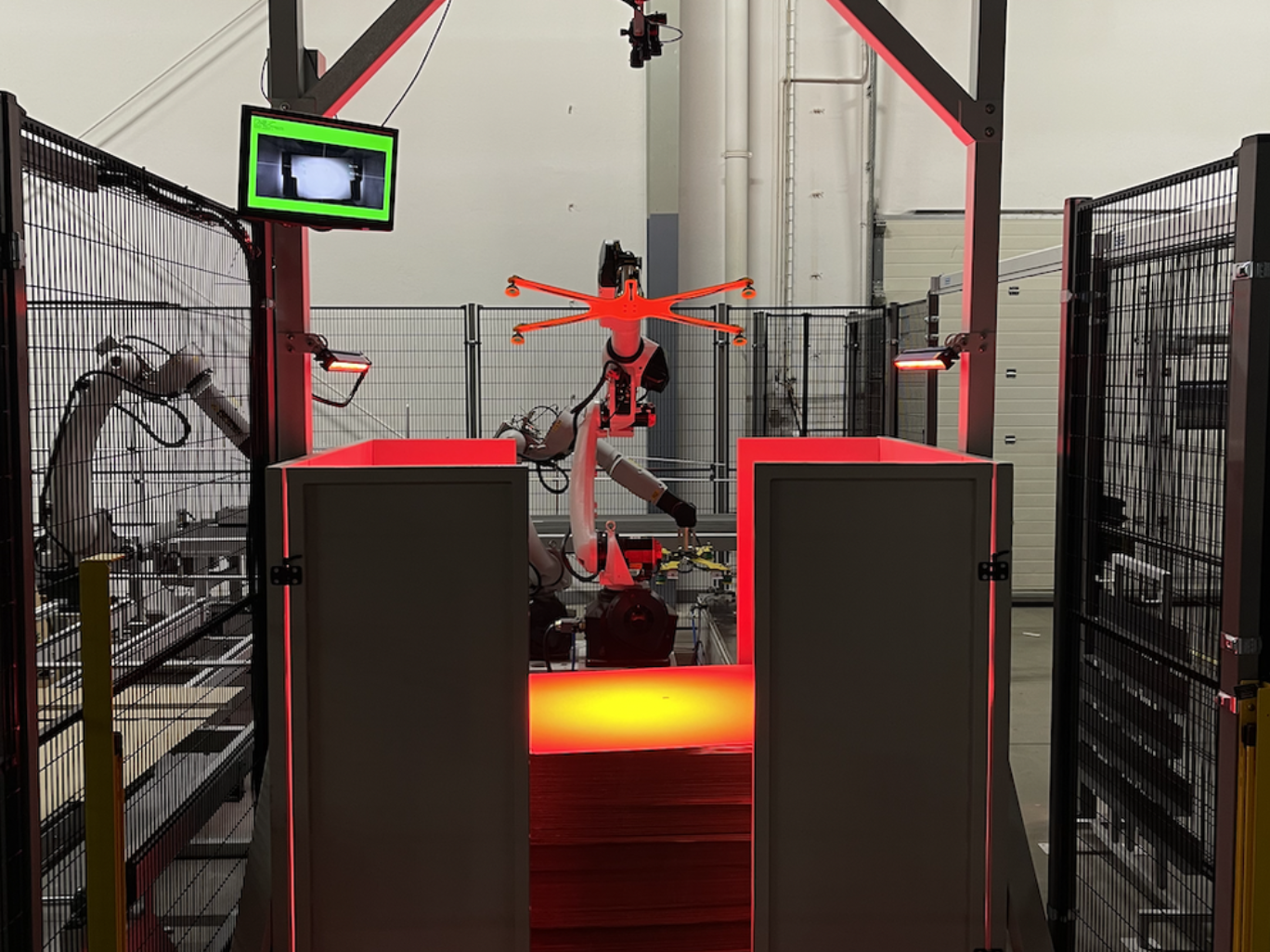 Vision system for cardboard folding robot
Vision system for cardboard folding robot
ARM CPU board with linux, working with Basler camera and live preview with web interface. Program calculate cardboard position in 3D space and distance which can be measured with very high precision (1mm on entire stack's height). All working with re
ARM CPU board with linux, working with Basler camera and live preview with web interface. Program calculate cardboard position in 3D space and distance which can be measured with very high precision (1mm on entire stack's height). All working with re
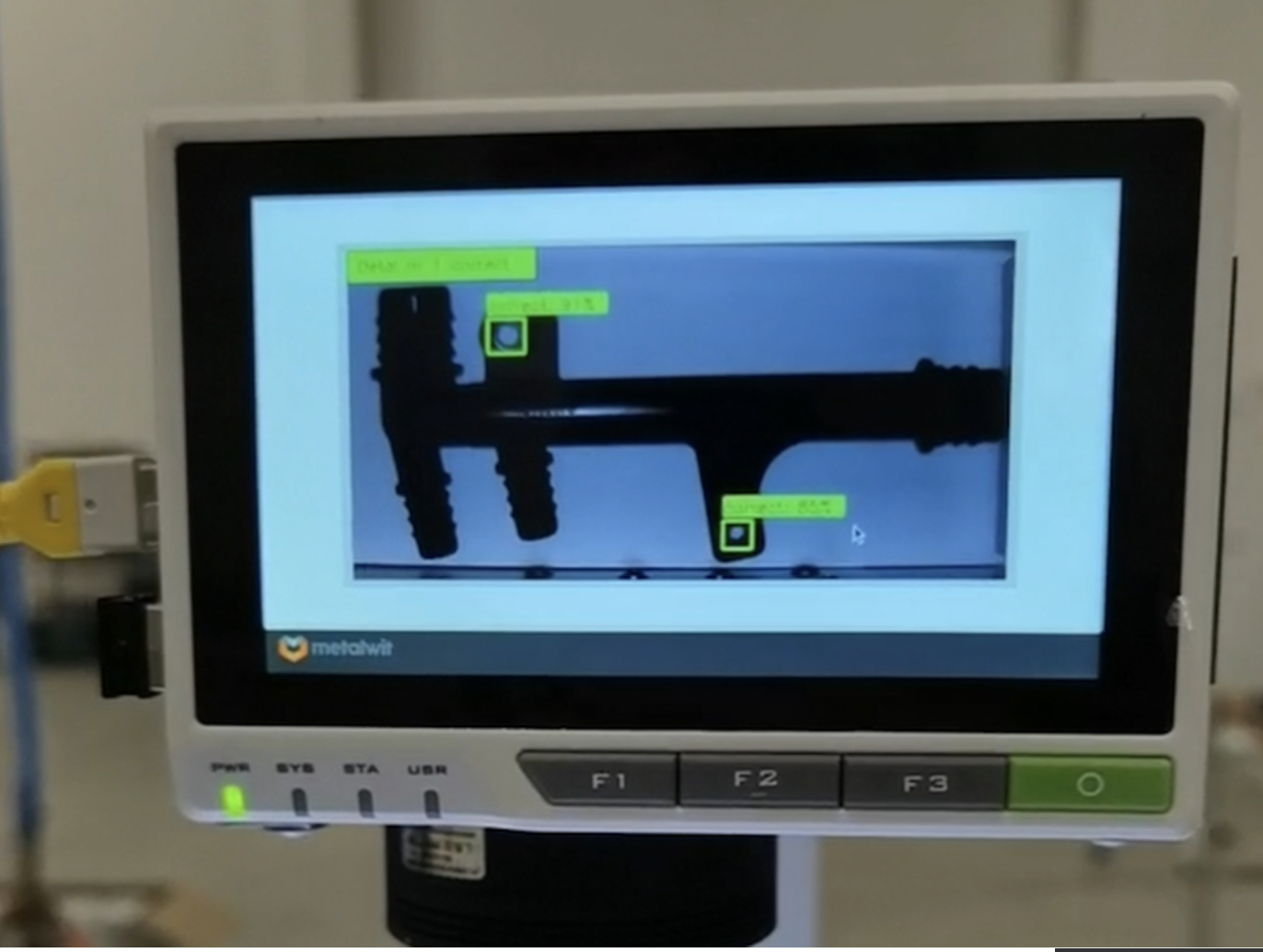
Touch panel based on Raspberry Pi CM4, used for object detection and validation with special trained model, in real time. Camera streams image to panel and display validation results. If detected object is incorrect, panel displays alert with confirm
Touch panel based on Raspberry Pi CM4, used for object detection and validation with special trained model, in real time. Camera streams image to panel and display validation results. If detected object is incorrect, panel displays alert with confirm
